I am delighted to welcome you all to the Department of Electrical and Computer Engineering. For those of you who are setting foot on campus for the first time, I extend a special welcome. We have all been through a lot of challenges and we continue to live in uncertain climes. Nevertheless, what I hope you will all find in ECE at UBC is a lively and warm community that challenges you to new levels of achievement.
Our wonderfully talented faculty members will be your guides and your allies as you explore many different aspects of design, implementation, and deployment of systems and solutions. They — along with your peers — will be your principal resource. I am sure that they will open you up to new possibilities. My colleagues at UBC are among the world’s best scholars and are recognized for their expertise in their fields. They are known for their scholarship and contributions to the practice of engineering. Talk to them. Get to know them during office hours — they are eager to have you drop by — or after class. Find out about their research.
I do want to emphasize that you have chosen to attend a research university. What does that mean? At the heart of this university is the spirit of inquiry. Faculty members are hired to ask questions and to explore possible answers, in collaboration with others both at UBC and elsewhere. In collaboration with graduate students and undergraduates like you. We write articles and books, register patents, start companies, and teach courses: these are all the ways in which we take our new ideas to the rest of the world with the lofty aim of improving human life and the world we live in. You are entering this culture of inquiry.
You have reached this stage in your life by demonstrating that you are excellent at answering questions. Now I ask you to learn how to ask questions; questions that matter. To explore possible answers. And to ask more questions. The hardest skill to learn may be to control the impulse to seek out quick and easy answers. As part of your participation in the culture of inquiry, find out how you can undertake your own original project: answering a research question, or creating new systems and products, while working in a professor’s lab or with your peer students. Generating new ideas, new knowledge, is the fundamental mission of a research university. You will find your time here much more rewarding if you — even for a short time –immerse yourself in that mission. There are several research opportunities for undergraduates in ECE and at UBC more broadly.
I invite you to consider the important difference between training and education. The etymology of the word ‘training’ is from Latin for ‘pull’ or ‘drag’, and eventually came to mean, among other things, ‘a connected series of things’. The general implication is that ‘training’ has to do with the known. On the other hand, you will live 60 or more years after you leave UBC and much will change during that time. The word ‘education’ has its roots in the Latin word ‘educere’, which means ‘to lead out’ and suggests a preparation for the unknown. You may be thinking about your first job — and you will be supported in that endeavour – but we believe that it is much morevaluable to educate yourself broadly, foundationally, so that you areready for many years of thoughtful and compassionate engagement with the unexpected.
The entire ECE (and UBC) community is here to support and encourage you with a healthy dose of competition. Again I draw attention to the origin of the word ‘compete’, which relates to ‘aim or seek together’. We are all here to strive together.
Much of what I have said is rhetorical. Let me now offer pragmatism: we all have our strengths and areas for improvement. If you experience a sense of overload and anxiety, do reach out to our advising team early: a modified sequence of courses may be better for you.
Adrienne Rich, in a commencement address to students at Douglas College, in 1977, said: “…that you cannot afford to think of being here to receive an education: you will do much better to think of being here to claim one. One of the dictionary definitions of the verb “to claim” is: to take as the rightful owner; to assert in the face of possible contradiction. “To receive” is to come into possession of: to act as receptacle or container for; to accept as authoritative or true.”
I will combine Rich’s message with UBC’s motto ‘Tuum est’: ‘It is up to you.’ You are in charge of your education. I welcome you to ECE with the exhortation that you be an active and engaged student and not a passive recipient.
“This might all sound obvious, but the simple truth is that forming good habits and time management takes effort and practice.”
Al-Shahna Jamal completed her BAsc and MASc at UBC Electrical and Computer Engineering, graduating in 2016 and 2018 respectively. Today, she’s a software engineer at Microsoft, and living in Seattle. We caught up with her to learn about her direction since her graduation from ECE, and how her time in our department has impacted her career.
Career Path
I completed my BASc. in Computer Engineering at UBC in 2016. I chose the co-op option which was an excellent way for me to gain exposure to fields within the software industry, as well as take a break from courses and experience the real world! For one of my co-op placements, I chose to do a research internship at the System-on-a-Chip lab at UBC, supervised by Dr. Wilton. I already had some exposure to digital systems design and FPGAs through coursework and wanted to learn more. Long story short, my undergraduate research time at UBC convinced me to pursue a MASc. at UBC as well.
My master’s degree was an excellent experience. I got to write and publish papers and present my work at conferences. During these conferences, I met students, professors, and industry professionals from around the world. I was very interested in the Catapult group at Microsoft Research since they were pioneering the use of FPGAs in the cloud. I took advantage of the networking opportunities at these conferences to connect with folks at Microsoft Research and interview with them. Our group has since become a product team in Azure, where I still work within the realm of FPGAs, using them as important accelerators in our data centers and cloud applications.
Current Position at Microsoft
I have been a Software Engineer at Microsoft for three years now. My work includes interdisciplinary projects, which involve developing the full stack, from software to hardware. I work with both software and hardware engineers daily, and a big part of my job is understanding the customer’s requirements and delivering what they need.
Previous experiences
You’ve already read about my undergraduate research experience at UBC. As part of the co-op program, I worked as a Quality Assurance Analyst at Atimi Software, where I tested the mobile applications that were developed in-house for third-party customers. I then worked as a Software Developer at Ericsson, where I wrote router software for the Smart Services Router. My final internship was at Altera (now a part of Intel), where I wrote software for the compiler team, targeting their Stratix 10 device.
Each of these experiences exposed me to different fields within the software industry, from mobile applications to networking to FPGA compiler tools. For me personally, I noticed that I had a continued interest working at the intersection of software and hardware and I actively pursued more opportunities in this area. I now feel lucky to be working with very talented and interdisciplinary engineers in the Azure Hardware Architectures group at Microsoft. I would absolutely recommend students to take advantage of the co-op program at UBC Engineering; this is where your career and network start, not after you graduate.
Biggest Obstacle
My first two years of engineering school were quite challenging for me. I think it was a combination of the intense workload, a new environment from high school, and not knowing how to effectively manage my time. I started paying attention to the students who were performing well and noticed some good habits and patterns from them. They were typically active learners who asked questions in class, tried to solve problems early on their own, and then went to office hours to seek help proactively when needed. These students also dedicated time for extracurriculars that they enjoyed, whether that was sports and fitness, or clubs on campus. They understood earlier than me that taking breaks for activities you enjoy is very healthy. This might all sound obvious, but the simple truth is forming good habits and time management take effort and practice. My own good habits didn’t form overnight, it was a process. So, start early and practice often.
Impact of ECE
ECE has an incredible faculty. It is worth taking the time to read about your professors and the research they are doing outside the classroom. From developing techniques to improve robot-assisted surgeries to powering electric vehicles in a sustainable manner, they are solving problems that can impact our society for the better.
In addition to faculty, UBC ECE has several clubs if you want to expand your horizons. I personally participated in the Engineers Without Borders chapter and the IEEE Women’s club.
And finally, my classmates. The students in your cohort will become lifelong friends and an important part of your network. It is inspiring to see the career paths of my fellow ECE alumni and to keep learning from them.
“One of the things I like about cloud computing research is how interdisciplinary it is. The complexity and scale of cloud systems, combined with a wide range of user demands, makes it an exciting research area.”
Meet Mohammad Shahrad, ECE’s newest Assistant Professor! Mohammad is joining UBC from Princeton University. His research focuses on improving the efficiency of cloud computing systems through better resource management and enhanced system/architecture integration. This upcoming year, he’ll be teaching CPEN 221 and EECE 571H at ECE.
We sat down with him to get to know more about his background, his teaching, what drew him to cloud computing, and why he chose the Electrical and Computer Engineering Department at UBC!
What is your educational and professional background?
After completing undergraduate studies at Sharif University of Technology, I went to graduate school in New Jersey, where I did my master’s and Ph.D. at Princeton University. I spent almost a year during my Ph.D. doing research internships at Microsoft Research, and then spent the last academic year as a lecturer at the Computer Science Department at Princeton University.
What brought you to UBC Electrical and Computer Engineering?
UBC is a globally renowned institution conducting cutting-edge research and graduating high-quality alumni across a wide variety of disciplines. In addition, UBC is in the vicinity of a vibrant metropolitan area with numerous relevant tech industries, and, more importantly, is surrounded by fantastic nature. All of these will facilitate a happy and successful journey for me and my students. As to why ECE, my research area is interdisciplinary and spans over the domains of software and hardware. I am very excited to be part of the diverse mix of faculty at ECE.
What are your areas of research and how did you get into this field?
My research focuses on improving the efficiency of large-scale cloud computing systems. Cloud systems form the backbone of today’s internet services and host most of the world’s data. At this scale, even the smallest inefficiencies can result in wasting significant amount ofmoney and energy. I’m always seeking ways to manage cloud infrastructure more wisely, and this involves designing better system software and enhancing hardware/software integration.
What fuels your research – what prompted you to research this area?
One of the things I like about cloud computing research is how interdisciplinary it is. The complexity and scale of cloud systems, combined with a wide range of user demands, makes it an exciting research area. Cloud computing is an enabling technology, and its advancement can benefit the IT industry, and ultimately society too.
What inspires you to teach?
Teaching is a unique opportunity that allows one to touch many lives, hopefully in the best way. Imagining the types of positions my students could hold in a few years, and the impact that I hope they’ll have on society motivates my teaching.
What do you believe is the future of your industry?
I think cloud services will become more and more transparent, making it easier for developers to focus more closely on creating value instead of spending time configuring or selecting cloud options. I also believe that we will see third-party vendors selling various kinds of specialized hardware accelerators through cloud providers.
What are you passionate about outside work?
Aside from spending time with my family, I love being in nature, gardening, and carpentry.
“The evolution of computer systems has transformed the way we live. With our increasing affinity for smart-everything and our increasing interactions with several connected devices in everyday life, the security of computer systems has become a huge concern. Finding solutions for these new challenges keeps me motivated.”
Pritam Dash is a first year PhD student in Electrical and Computer Engineering at UBC. Along with with Guanpeng Li (University of Iowa), Zitao Chen, Mehdi Karimibiuki, and Karthik Pattabiraman, he has recently published a new paper: “PID-Piper: Recovering Robotic Vehicles from Physical Attacks.” This paper was awarded the Best Paper Award at the recent IEEE/IFIP International Conference on Dependable Systems and Networks (DSN), 2021- number one out of nearly 300 total submissions!
In this interview, he discusses his recent award-winning paper, the future of safety for robotic vehicles, and why researching the security of autonomous systems is so important.
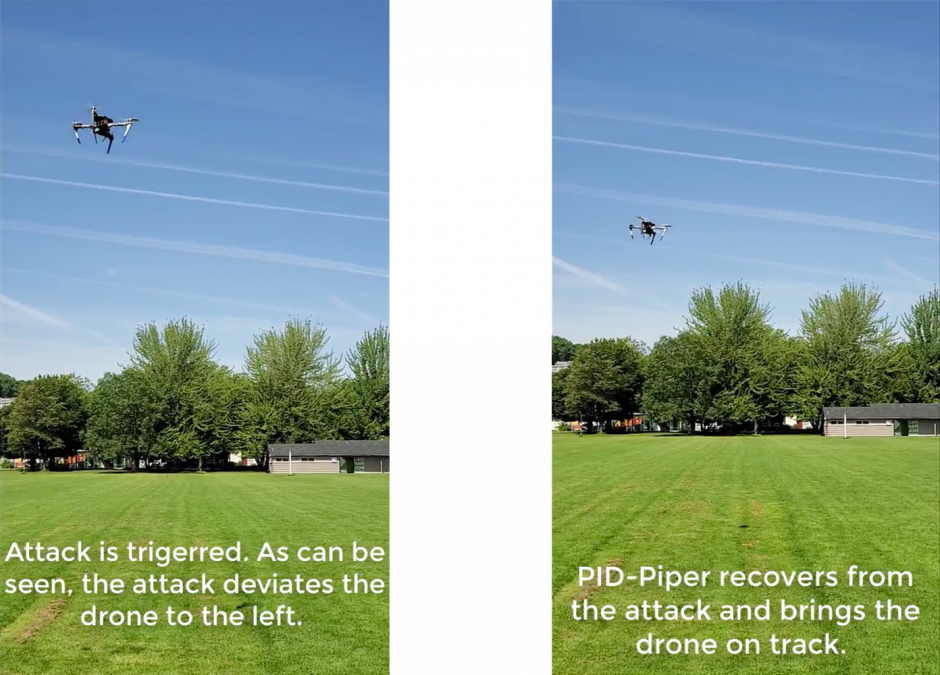
Testing the PID-Piper technique. You can watch the full video.
What is your winning paper about? Why is this line of research important?
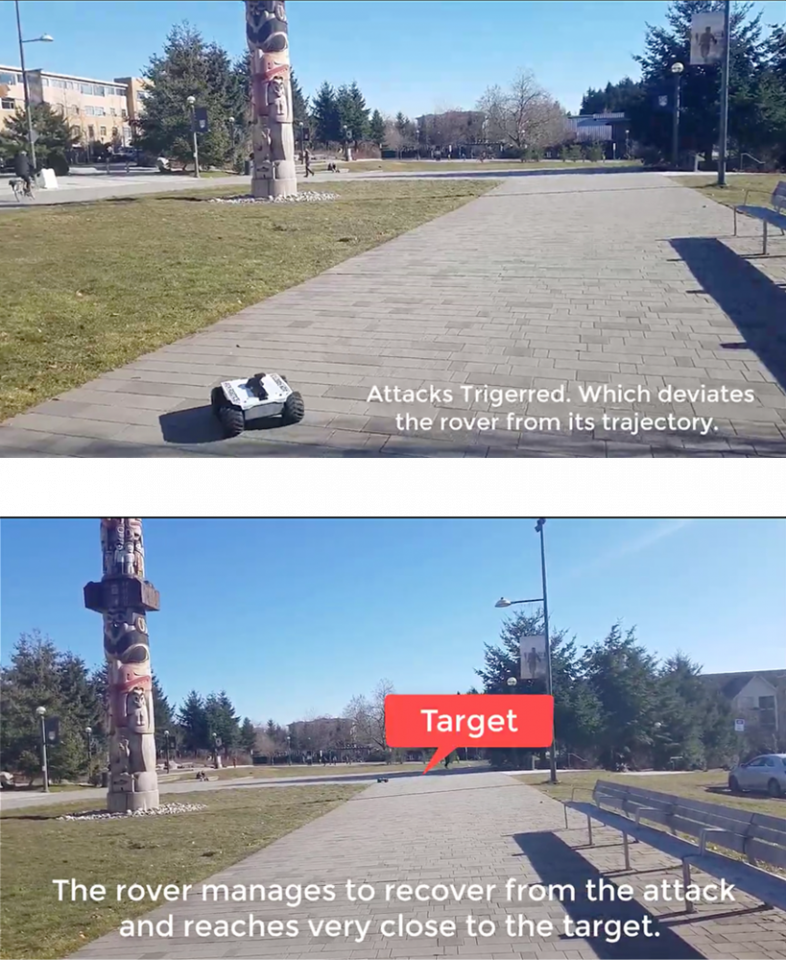
In our paper, we present a new technique for mitigating sensor tampering attacks on autonomous robotic vehicles (RV), such as drones and rovers. Attackers can manipulate crucial sensors in RVs, like GPS or gyroscopes, and can hijack or crash RVs, resulting in damage and injuries- attacks like this have been performed on military and commercial drones. Our new technique, called “PID-Piper,” prevents the hijacking and the physical damage that can result from these attacks. What PID-Piper does is monitor the RVs during runtime to detect the attacks, and then, if it detects an attack, it activates a recovery controller that capacitates the RV to complete its mission despite the malicious interventions.
Autonomous systems such as drones and rovers are increasingly used, and make up a fast-growing industry. Attacks can disrupt critical missions and tasks, and this can have extensive economic impacts. And, as autonomous systems interact with us in the physical world, malicious intervention can cause people serious injuries. It’s important to identify and mitigate these security vulnerabilities before these systems are deployed widely.
What is the goal of your doctorate research? How does the topic of this paper fit into this?
In my doctoral research, I’m focusing on developing techniques to make autonomous systems safe and reliable. Basically, this involves analyzing the building blocks of autonomous systems (things like sensing and perception modules, control system, autonomous logic, and AI techniques) for vulnerabilities, and then mitigating these vulnerabilities. The goal of this is to enable autonomous systems such as RVs to operate normally, with minimal disruptions despite attacks or failure.
In this paper, we focused on one type of vulnerability- attacks targeting RV sensors. These attacks can’t be prevented by traditional software security techniques, so our attack resilient controller framework addresses this issue by enabling RVs to recover from sensor attacks and operate normally.
Testing the PID-Piper technique. You can watch the full video.
What is exciting to you about this topic?
Autonomous RVs have tremendous potential- not just in industrial sectors, but also for crucial tasks like carrying emergency medical supplies and assisting with disaster relief. Our research in the security and reliability of autonomous systems can help in developing safe and robust RV systems, and in ensuring that autonomous RV systems can handle even the worst possible circumstances. I believe that, by setting high safety standards, we can accelerate the use of autonomous systems in many more sectors and can begin to feel confident using RVs in everyday life.
What has motivated you to continue pursuing this research?
The evolution of computer systems has transformed the way we live. With the proliferation of connected devices, and our increasing interaction with them, the security and reliability of computer systems has become a huge concern. Our affinity for smart-everything has led to decentralization of computer systems and promotes autonomy in critical infrastructures like power grids, water treatment plants, in the automotive industry, etc. This presents new risks and challenges: intelligent designs and techniques must be developed to ensure the security and reliability of future computer systems. Finding solutions for these new challenges in a fast-evolving field keeps me motivated to pursue research in this area.
What has your career path looked like?
I completed my undergrad in Software Engineering at the Vellore Institute of Technology in India. During my undergrad, I’ve had some great opportunities- I worked at research institutes such as Fraunhofer SIT in Germany, and A*Star/NUS in Singapore. Following undergrad, I worked at the Technical University of Graz in Austria as a Research Engineer. After two years, I decided to return to graduate school and chose UBC for both my master’s and doctoral studies.
What advice do you have for a student interested in this field?
Designing and developing autonomous systems involves a lot of different types of expertise- namely in computer systems, robotics and control, signal processing, and computer vision. I’d encourage interested students to broaden their knowledge, even if it’s outside of their core area. The ECE department provides the perfect platform for this, with our wide range of courses offered, and we have professors who are experts in all of these fields.
Interested in having your own story shared? Do you have an interesting project, job, or initiative? Want to discuss your experience at ECE or your outlook on engineering? Get in touch with us, and you could win ECE merch!
“As a TA, you learn to look at problems from a different perspective, and come up with unique ways to explain the same problem to different audiences. ”
Rubinder Nagi completed his BASc and MASc at ECE, graduating in 2018 and 2021. Over his five years at ECE, he boasts the achievement of having been a teaching assistant (TA) for ten different courses, and in total has TA’ed an impressive eighteen separate times!
He’s TA’ed for APSC, ELEC, CPSC, and other courses taken by ECE students, and was even awarded the graduate teaching award by the CS department, recognizing his work managing over 34 other teaching assistants as Head TA for APSC 160.
We spoke to him about his experience in this important role. Rubinder shares his insights into the ups and downs of TAing, and discusses how his work teaching impacted his time at ECE and outlook as an engineer.
What has your career path/academic experience looked like?
I completed my BASc in Electrical Engineering in 2018 at UBC with one year of co-op, and joined the MASc program, under Christine Chen. After defending my thesis, “Bayesian Inference of Parameters in Power System Dynamic Model Using Trajectory Sensitivities” in early 2021, I began working at Intel as a hardware engineer. I really enjoyed my eight years at UBC- I met wonderful people and made connections with students, peers, colleagues, and professors.
Why did you start TAing?
I was passionate about teaching when I was young, even before I joined UBC. In my second year, the instructor for CPSC 259 told us they preferred students who have taken the course to TA it. That ended up being the first course I TA’ed, and it kickstarted my journey as a TA for the rest of my time at UBC.
What was TAing like at first? Did you face any initial challenges?
I started TAing in my third year of undergrad. Initially it was quite challenging, as I didn’t have experience teaching in a group setting or holding lab sessions. Over time, I became more comfortable with the role and improved my teaching skills. Since I was TAing a course that I’d taken one year ago, few of the students were also my classmates in other courses- which was quite an interesting experience! This happened again when I was TAing graduate courses later on.
As I gained more experience, I decided to take on more responsibilities. During my last year at UBC, I was the Head TA for APSC 160, and managed over 30 TAs (including distributing grading, and managing exam problems, lab sections, TA hours etc) online. I also received the CS GTA award!
How did your approach to TAing change over the course of your time at ECE?
I’ve worked with some really great TAs and instructors, who helped me improve my teaching skills. My explanation style has evolved as I observed how experienced TAs and instructors answered student questions. Now, I’m able to break down a problem into manageable steps and solve it one step at a time, which keeps students from feeling overwhelmed. Problem solving is an important skill for an engineer, and I tried my best to make students eager to face new challenges.
What was your favourite part of TAing? Any favourite courses, topics, or instructors? Why?
My favourite part was interacting with students and watching their faces glow when they finally understood the material. There’s no greater joy than seeing students light up as they solved a problem that they’d been stuck on for a whole week! I missed this a lot during the pandemic, as pretty much all the students had their webcams turned off.
I’ve TA’ed over 10 courses in the past five years. My favourite course to TA is APSC 160- it consists of a diverse audience, from programming pros to students who’ve never written code before. All in all I’ve TA’ed it seven times. Sometimes students would solve a problem in such a way that it left all the graders amazed- none of us had thought of that perspective.
I enjoyed working with all the talented and competent instructors at UBC. My favourite instructor to work with is Dr. Luis Linares, as I loved his classes as a student and how energized he was during his lectures. I TA’ed his courses as a grad student, and I saw all the work that needed to be put into making YouTube videos, WeBWorK assignments, exam solutions, Canvas quizzes, and rubrics. It’s a fascinating experience to see a course you took as a student from a grader’s perspective.
What have you learned?
TAing has significantly improved my confidence, communication, public speaking, and intrapersonal skills. My audience ranged from first year students to people with 10+ years of industry experience. As a TA, you learn to look at problems from a different perspective, and come up with unique ways to explain the same problem to different audiences.
What is your advice for other students who might be interested in working as a TA?
One misconception is that one needs to be in a masters or doctoral program to be a TA. Although this is true for higher-level courses, students can become a TA as early as in their second year!
Even if a student doesn’t have excellent grades, they can talk to the course instructors about TA positions, and show their interest and enthusiasm for TAing. ECE students are preferred to TA CPSC 259, as they are the only ones who take this course. APSC 160 has over 600 students and 30 TAs with various degrees of experience. A TA for this course could be completing their BASc, BSc, MASc, MEng, MSc, or PhD!
Interested students can apply for Undergraduate (or Graduate) TA positions with the ECE as well as with the CS department. Prospective or current TAs can attend events offered by UBC CTLT to prepare and improve themselves for this role.
It’s a great learning opportunity and you form invaluable connections. To quote Benjamin Franklin,
“Tell me and I forget, teach me and I may remember, involve me and I learn.”
Rubinder Nagi told us about his ECE experience through our survey. Fill out this survey to let us know if you have an ECE experience you think would make a great article. If your story is published on the website, we’ll send you ECE merch!
Khaled Ahmed, Dr. Mieszko Lis, and Dr. Julia Rubin
Congratulations to Khaled Ahmed, Dr. Mieszko Lis, and Dr. Julia Rubin, who received the Distinguished Paper Award at the IEEE International Conference on Software Testing, Verification, and Validation (ICST) 2021 for their paper, “MANDOLINE: Dynamic Slicing of Android Applications with Trace-Based Analysis.”
The paper, Dr. Rubin explains, “proposes an efficient and effective program slicing approach for mobile applications, which outperforms the state-of-the-art in this area. It is used in our current work on mobile malware detection and can also be used by other researchers and developers to build techniques for a variety of software engineering tasks, including automated program testing, repair, comprehension, and evolution.“
”Dynamic slicing was already extensively studied in the literature.” Khaled says. “However, we found the state-of-the-art in slicing Android apps was far from perfect. MANDOLINE introduces a highly accurate and efficient slicing tool. We also contribute a benchmark with manually marked ground-truth to evaluate dynamic slicing for Android – the first of its kind.”
“I’m thankful to my co-authors for the productive collaboration and to the ICST community for this recognition.” Dr. Rubin adds. “I hope this work will facilitate additional research in the area of mobile analysis.”
“Striking the right balance between the social and technological is what has given our app a competitive edge time and time again…”
Parsa Riahi is a senior undergraduate student in Computer Engineering at UBC, working on Machine Learning Research at Huawei. When not busy with studying or his co-op placement, he is hard at work developing a new startup that he hopes will revolutionize UBC’s social life and revitalize Vancouver’s restaurants.
Parsa Riahi is the Chief Technology Officer at Dyne, an app that has already accumulated hundreds of users. Dyne ranks as one of UBC’s top 10 ventures, and has entered the top 7% of 30000 companies who applied for Y-combinator. In this interview, Parsa discusses the ups and downs of startup development, his hopes for Dyne, and how his time at ECE shaped this initiative.
Dyne logo.
1. What does Dyne do?
As a UBC student, I always faced challenges staying connected with friends when our course schedules diverged. With Dyne, we combat isolation by connecting people over food. We have an app that uses map-based features such as radar to provide restaurant recommendations, shows real-time wait times, and suggest friend’s profiles- which allows users to meet up at a restaurant in just 5 clicks.
2. What has the process of developing Dyne been like? What is your role in this process?
The Agile development cycle at Dyne is, simply put, a rollercoaster. There are great highs in creating new features, deep lows in debugging and testing, cyclic loops of finding user issue after issue and designing solutions for them, and there are many times when things feel upside down. Despite all these challenges, I love the ride.
Once we understood our user base, it was a long road to developing a final product, starting from UI/UX to system design to full-stack feature development to DevOps, and finally to deployment.
My own role in this process is all over the place. I work around 80-90 hours a week and I handle a little bit of everything right now, but I am also supported by a fantastic team of twelve other engineering and computer science students. After all, as a UBC startup targeting students, it only makes sense to have that perspective throughout our company.
Henry McCreight (COO), Parsa Riahi (CTO), and Arnav Mishra (CEO)
3. What was the most challenging part of developing the app?
One of the most challenging parts of leading a social startup is understanding your user base. As engineers, we are often overly focused on the tech and lose sight of our core audience. Striking the right balance is what has given Dyne a competitive edge time and again- we have gotten into the top ten ventures at UBC and into the top 7% of 30000 applicants at Y-combinator. Most of all, it has allowed us to create an incredible and disruptive mobile app for our users.
4. How has COVID-19 affected the development of Dyne?
COVID-19 initially hit Dyne hard. We were unable to have in-person meetups- the backbone of our app. But in the 16 months since life in public shut down, we have seen a surge in our following. We used this time to really listen to our users and develop the best product possible. While we hit many barriers along the way, we have found a new resilience that has ensured Dyne will be instrumental in helping restore social and restaurant life.
The Dyne team meeting over Zoom.
5. What have you learned?
I have learned a lot — mostly because I have failed a lot. Beyond all the various technologies and Agile methodologies I’ve picked up, this ability to fix failures quickly has been vital in ensuring we move fast and meet deadlines. Albeit, sometimes fast fixes become all-nighters, and some weeks you work over 100 hours- but still, you press on because you have a responsibility to your users, your team, and yourself to consistently deliver on your promises.
6. What did you enjoy the most about developing the app?
I am obsessed with the impact that Dyne can have for all UBC students. I love that we are connecting friends old and new. Our app has established hundreds of meetups in just the first few weeks of our launch, and we are now poised to help revitalize the restaurant economy.
7. How has this experience fit into your overall experience at ECE?
ECE has given me the foundation to think from a principles-first perspective, and from a software engineering viewpoint. It has given me access to not only my great team (many of whom are from ECE) but also many wise and interesting professors and mentors from the faculty and industry at large.
Specifically, Dyne’s technical mentor and Lead SWE at Facebook’s Oculus, Matt Keoshkerian, and my long-time mentor and friend, ECE Professor Shahriar Mirabbasi, have taught me how to think and expand my potential. For this, I will be forever indebted to them.
8. What are your hopes for the app in the future?
I hope this app becomes a part of interaction in the social landscape of UBC and all universities across North America. I know that we at Dyne will not stop until we see this through and I am truly excited to bring everyone on this journey with us.
Interested in having your own story shared? Do you have an interesting project, job, or initiative? Want to discuss your experience at ECE or your outlook on engineering? Get in touch with us, and you could win ECE merch!
Six new projects led by UBC ECE researchers have been awarded a total of $1.3 million through the Natural Science and Engineering Research Council’s Discovery Grants and Discovery Accelerator Supplements programs. These awards, which are part of the Government of Canada’s investment of more than $635 million into science and research, will support ECE faculty in fostering new research, providing an environment for training and capability, and purchasing essential equipment.
From powering electric vehicles to experimenting with quantum computing, learn about how five ECE researchers will be using this funding to explore new ideas in electrical and computer engineering.
Thrampoulidis, Christos: Fundamentals of Modern Machine Learning: A Precise High-dimensional Approach
$220,000 (5 years)
What research will you be undertaking as a part of this grant? What impact will this work have?
We aim to use data-driven machine-learning (ML) algorithms to create automated decision rules in more aspects of everyday life — such as in disease diagnoses, self-driving cars, and digital banking. But we need to make sure that these algorithms meet critical requirements on safety, fairness, and efficiency. My goal is to contribute to the expanded use of ML by developing statistical theory-driven models equipped with formal theoretical guarantees that can inform and guide the design of algorithms that fulfill such requirements.
What draws you to this work?
An exciting feature of my work on modern learning theory is that there is a vast gap between theory and practice. Today, the most impressive recent discoveries in ML come from empirical/heuristic approaches inspired by practice. For the most part, we do not yet understand fundamental aspects about the operational characteristics and limitations of existing techniques. What drives me is the challenge to close this gap.
What specific aspect of this research are you most excited for, and why?
To me, the fast-growing pace of the field is most exciting: new algorithms, architectures, and phenomena are constantly discovered and documented; but also, as these new phenomena emerge, new questions and challenges arise — and with that, new theories await to be formulated. This fast pace of discoveries keeps us on our toes and constantly provides opportunities to learn something new.
Shahrad, Mohammad: From Serverless to Seamless: Building the Next-Generation of Cloud Systems by Eliminating Service Integration and Resource Heterogeneity Limitations
$120,000 (5 years)
What research will you be undertaking as a part of this grant? What impact will this work have?
This grant is focused on building cloud computing systems that can handle different usage scenarios, without a user or developer intervening. This way, developers spend less time figuring out how to connect different cloud services and can develop applications in a platform-agnostic manner.
What draws you to this work?
There are many different cloud providers, each with numerous varieties of services. Assisting developers through automated decision-making is critical in helping them focus on their primary role of software development.
What specific aspect of this research are you most excited for, and why?
Perhaps the most exciting part of this research is exploring new ways to seamlessly use heterogeneous hardware in cloud data centers. Modern cloud data centers are equipped with specialized hardware such as Graphics Processing Units (GPUs), Field Programmable Gate Arrays (FPGAs), and smart Network Interface Controllers (NICs), and current technology trends will only diversify this mix in the future.
Wang, Zehua: Next Generation Secure and Collaborative Internet of Things (IoT) System – Leveraging Blockchain for Decentralized Control and Privacy Preserving Machine Learning
X
$ 140,000 (5 years)
What research will you be undertaking as a part of this grant? What impact will this work have?
Basically, this grant provides us the opportunity to work towards building a trustworthy and collaborative environment where individuals can contribute their knowledge for machine learning and AI- without giving out their private data. It means the value of the data always belongs to data owners, who can directly benefit from their data without privacy leakage.
What draws you to this work?
My motivation with this research is to put the authority and control of data back to the hands of people. In most cases, it is the people or users that create the data when using online services. The service provider with big data and machine learning algorithms can build a better service when more data is received. On the other hand, the data contributed by individuals may be private, and the value of the data may not directly benefit the original data owner
What specific aspect of this research are you most excited for, and why?
Big data is the most valuable aspect of an information system, but usually, without a centralized system, we can’t guarantee the data’s quality or format, and can’t verify each user’s identity or authority. The most exciting aspect of this research is investigating how to resolve these issues. Another exciting element is incentivizing people to collaborate faithfully with the system by designing incentive mechanisms.
Ordonez, Martin: Flexible Power for Future Zero-Emissions Shipping and Delivery
X
$320,000 (5 years)
What research will you be undertaking as a part of this grant? What impact will this work have?
In a medium-sized North American city, collectively, people drive one billion kilometres each year for consumer goods and food, which leads to up to 400,000 tonnes of greenhouse gas emissions. In response to this, we envision the development of a home delivery infrastructure. The short-term goal of our program is to enable optimal infrastructure to supply energy to electric home delivery vehicles. The energy infrastructure technology we develop will reduce the impacts associated with peak load for charging an extensive, dynamic, fleet of electric vehicles.
What draws you to this work?
I love delivery, but I love it even more when it’s done with electric vehicles in a sustainable manner. Online shopping and delivery could potentially reduce up to 87% of greenhouse gas emissions compared to driving to the store.
What specific aspect of this research are you most excited for, and why?
I’m most excited about opening new research opportunities for our graduate students that lead to great jobs!
Salfi, Joseph: Reactive Ion Etcher for Commercially Relevant Quantum Devices
X
$150,000
What research will you be undertaking as a part of this grant? What impact will this work have?
Quantum technologies such as quantum sensors and quantum computers are expected to have measurement and computational capabilities that are provably impossible for classical technologies. However, we are still learning the best ways to design and build them. With this infrastructure grant, we are receiving cleanroom equipment that expands our capabilities to design and build quantum technologies to realize this potential. This grant will enable us to rapidly build devices for quantum sensing and computation directly inside our own cleanroom at UBC, which we can then carry out our own experiments on.
What draws you to this work?
Quantum computers and sensors store, process, and measure information that is encoded in a fundamentally different way from our familiar classical technologies. What draws me to this research is that this is a fundamental change in the way we process information- this is poised to revolutionize what can be computed. There are many problems that need to be solved for us to realize this potential.
What specific aspect of this research are you most excited for, and why?
What is most exciting about this infrastructure is that it will enable graduate students to build new types of devices directly at UBC. These devices can kickstart new academic research and academia-industry partnerships that could realize the potential of quantum technologies.
Lukas Chrostowski was also awarded $380,000 for his project Silicon Photonics for Quantum Computing.
Interested in having your own story shared? Do you have an interesting project, job, or initiative? Want to discuss your experience at ECE or your outlook on engineering? Get in touch with us, and you could win a special ECE prize.
*Content warning: The following announcement refers to residential schools*
We in the Electrical and Computer Engineering Department would like to express our heartbreak and solidarity with Indigenous students, staff, faculty and community members as a result of the ongoing work to recover unidentified remains of children at former residential schools. We share in the grief being experienced at this incredibly difficult time. While people may already have ways to cope and find strength, we would like to encourage connecting with a loved one, slowing down to rest, or reach out to the supports that are available 24/7.
Resources for Indigenous students:
Hope for Wellness Help Line offers immediate counselling and crisis intervention to all Indigenous Peoples across Canada. It is available 24/7 and services are offered in English and French, and by request in Inuktitut, Cree, and Ojibway. Call the toll-free Help line at 1-855-242-3310 or connect to the online chat at www.hopeforwellness.ca
Indian Residential School Crisis Line (IRSSS) offers emotional support and crisis referral services by calling the 24-hour national crisis line at 1-866-925-4419.
The KUU-US Crisis Line Society operates a 24/7 crisis line serving the entire province. More information is available at https://www.kuu-uscrisisline.com/ or BC Wide Toll Free: 1-800-KUU-US17 (1-800-588-8717)
Métis Crisis Line is available 24/7 for crisis services. Call BC Toll Free: 1-833MétisBC (1-833-638-4722)
For non-Indigenous individuals, you may be thinking of what you can do to support Indigenous members of your community. In doing so, remember to be mindful of the actions you can take as an individual including learning more about reconciliation by reading the Truth and Reconciliation Calls to Action, reviewing the Indigenous Strategic Plan, and speaking to other non-Indigenous friends about your learnings. We also encourage students to reach out to the UBC Student Assistance Program if needed: https://students.ubc.ca/health/ubc-student-assistance-program-sap
“Stepping into a new field has been a challenge… But every single step has been joyful. “
Golara Javadi is a third-year PhD candidate in the Electrical and Computer Engineering department at UBC. In her own words, she’s someone who’s “constantly looking for new adventures and opportunities.”
Golara obtained her Bachelor’s degree from Isfahan University of Technology, and in her Master’s at Simon Fraser University, where she worked on cognitive radio and signal processing. Following that, she worked in the power industry for three years at ZE Power Engineering.
Her work experience is in power engineering- but Golara now studies AI. She recently became a fellow with the Borealis AI research centre, where she will be working to contribute to the advancement of Artificial Intelligence and Machine Learning. She’s passionate about enhancing peoples’ lives with the help of AI, through her research with ECE and Borealis AI.
In this interview, she discusses her experience navigating this transition and finding success at ECE.
What research will you be conducting as part of your fellowship with Borealis AI?
I am working on developing a novel technique for prostate cancer detection, based on ultrasound data enhanced with AI and machine learning.
How did you find out about this fellowship?
I follow Borealis AI on Linkedin. I was browsing my feed, and I noticed their post about this fellowship. I wasn’t hopeful about it, but I’ve learned not to self reject, and I decided to go ahead and apply. The process was straightforward from there.
What has your career path looked like up to this point?
My background was always electrical engineering, but I’ve tried different disciplines. I did my bachelor’s in telecommunication and electronics in Iran. After that, I continued on to a master’s in telecommunication at SFU, and started working as a co-op student in a software company, ZE Power Group.
Halfway through my co-op, I decided to switch to their sister company, ZE Power Engineering. This company was owned by the same owner but existed in a totally different area- the power industry. I got a job offer after my co-op terms ended.
My professional character formed there, and in that company I grew from a co-op student, to an electrical engineer, to a team lead. After three years, I decided to move on to the PhD program at UBC to work on AI. Right now I am working as an intern at Borealis AI, where they build AI solutions for RBC products.
Why did you choose to change your focus? What was this like?
I was always passionate about research, especially in signal processing and AI. After three years of working in the power industry, I was no longer feeling challenged enough by the daily routine of my job, and I was looking for a change.
I’m always open to new opportunities and am open to stepping out of my comfort zone, but this change was not easy, both financially and technically. The Four Year Doctoral Fellowship (4YF) program at UBC helped me with financial aspects, and I was able to overcome the technical challenges by reading a lot and getting support from my great friends and colleagues at UBC and SFU.
What has been a challenge of PhD study at ECE?
Coming back to school after industrial experience and stepping into a new field has been a challenge, as well as keeping up with the pace of new methods and advanced techniques that are being generated in academia every day. But every single step has been joyful.
In the beginning, there were a lot of challenges. I had to build the foundations of my own computer science knowledge and start implementing very quickly. I am still learning, and I am quite happy with where I am now.
What has been something you’ve enjoyed?
Through my studies at ECE, I tried to be proactive and not only focus on learning and publishing results, but also be involved in extracurricular activities- things like being a secretary in ECEGSA and a woman in engineering advocate with the “Women in Engineering and Geoscience Division” of EGBC.
What is one piece of advice you would give a new student starting their program at ECE?
If you don’t feel happy with what you are doing, get out of your comfort zone. Trust in yourself, and never self-reject.